越擎科技
?
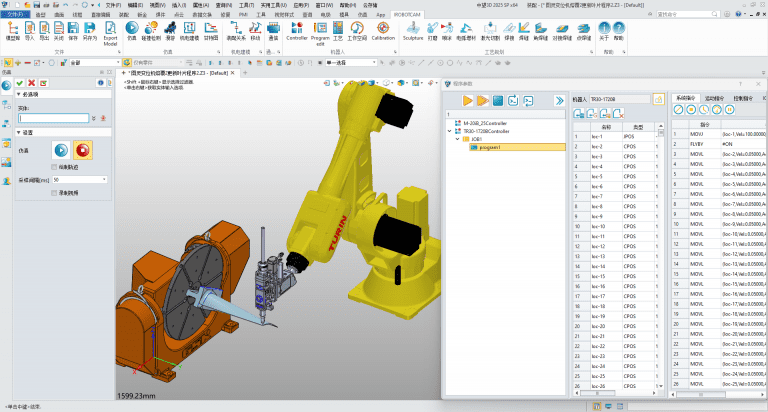
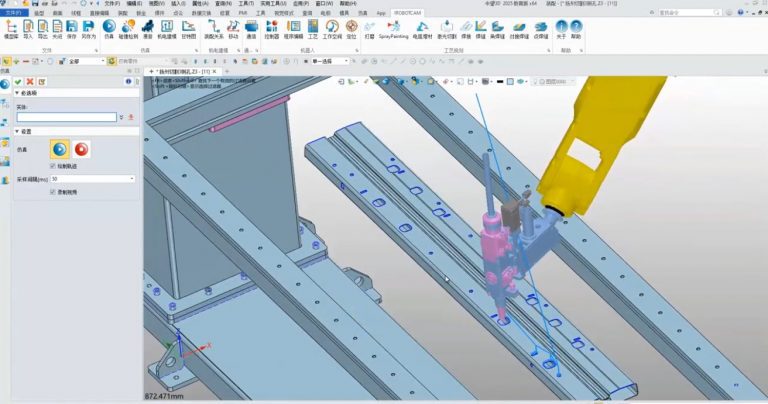
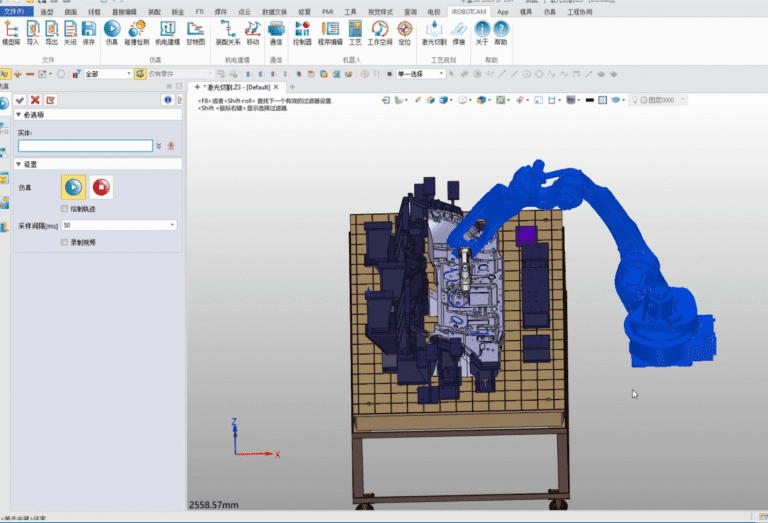
導入機器人及工件> 工件的定位與機器人標定>實現軌跡編程> 全場景的仿真> 代碼輸出及機器人加工
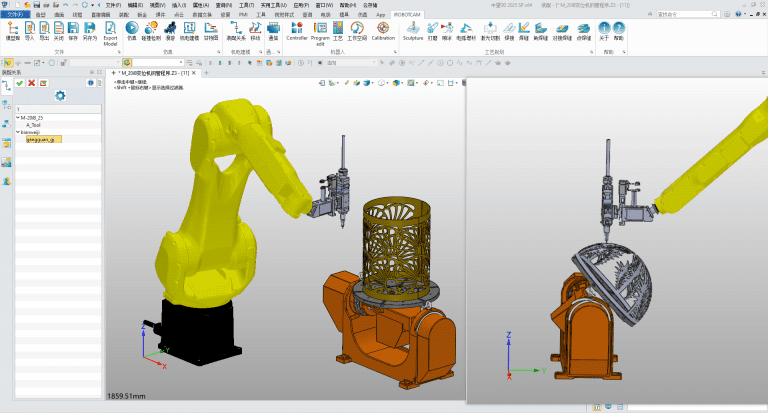
三維結構建模> 機電建模與運動仿真>軌跡生成與虛擬調試> 后置處理與加工仿真
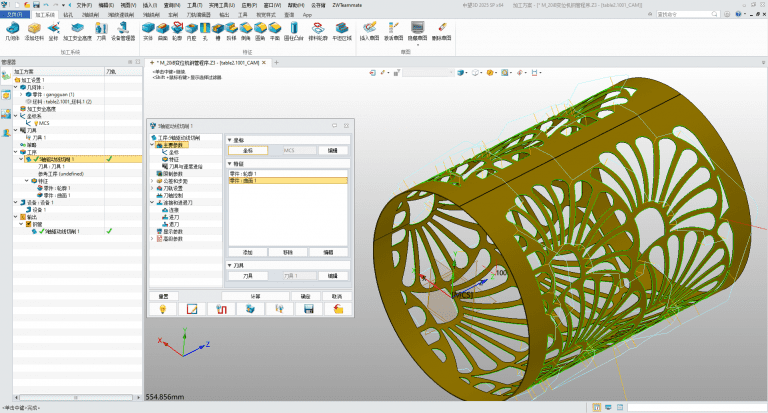
摘要: 機器人激光熔覆加工對于葉片等復雜的工件加工
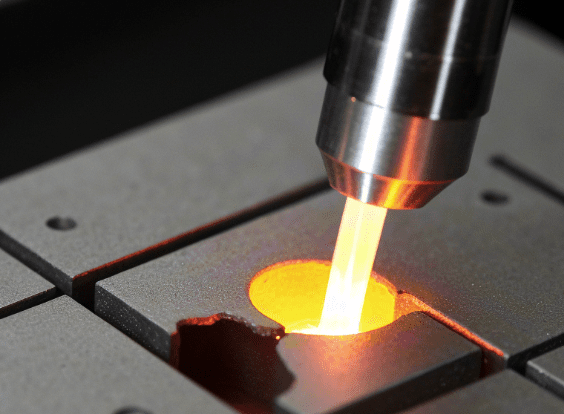
摘要:激光具備高精度的特性,而激光設備如何實現高精
概要:越擎科技發布激光加工編程與仿真技術白皮書,闡
概要:機器人激光的工藝主要在于高精度,而利用激光實
概要:揚州十牛自動化擁有豐富的機器人與智能自動化產
摘要:機器人激光加工的使用日益廣泛,而快速實現機器