概要:面對機器人建模與訓練平臺的門檻高及費用高昂的問題,越擎科技利用自身在機器人軟件的行業(yè)技術(shù)優(yōu)勢,基于國產(chǎn)三維幾何內(nèi)核,發(fā)布機器人建模模塊,擴展URDF接口,打通ROS機器人的仿真分析。
面對機器人建模與訓練平臺的門檻高及費用高昂的問題,越擎科技利用自身在機器人軟件的行業(yè)技術(shù)優(yōu)勢,基于國產(chǎn)三維幾何內(nèi)核中望3D平臺,發(fā)布iRobotCAM機器人建模模塊。
- 利用iRobotCAM的建模能力與自研的物理引擎的能力,iRobotCAM可以快速的創(chuàng)建與管理機器人模型并進行物理仿真;
- 利用擴展的URDF導入與導出接口,iRobotCAM進一步打通與ROS機器人的對接,用戶可以打通機器人建模與機器人仿真,更有效的訓練機器人的物理模型。
下面以最簡單的工業(yè)機器人為例,進一步闡述如何利用iRobotCAM實現(xiàn)機器人建模與訓練模型:
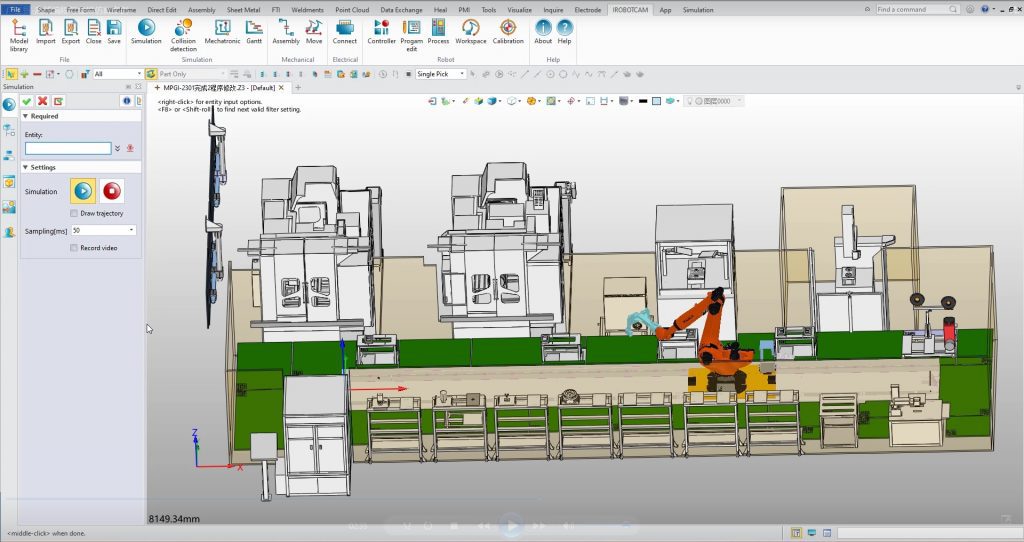
- 數(shù)字化三維場景建模
- 利用三維建模功能,iRobotCAM可以建立復雜的三維模型,完成數(shù)字化場景的建模;
- 支持導入iges, STEP, Solidworks, Creo, NX, Catia, Inventor, Parasolid等三維格式,以便重復利用現(xiàn)有的三維模型,提高機器人數(shù)字化場景的搭建效率。
- 機電設(shè)計與機器人庫
- 傳感器數(shù)據(jù)環(huán)境的建立:支持包括西門子,三菱,匯川等品牌的PLC信號系統(tǒng),同時支持自定義更多信號接入設(shè)備
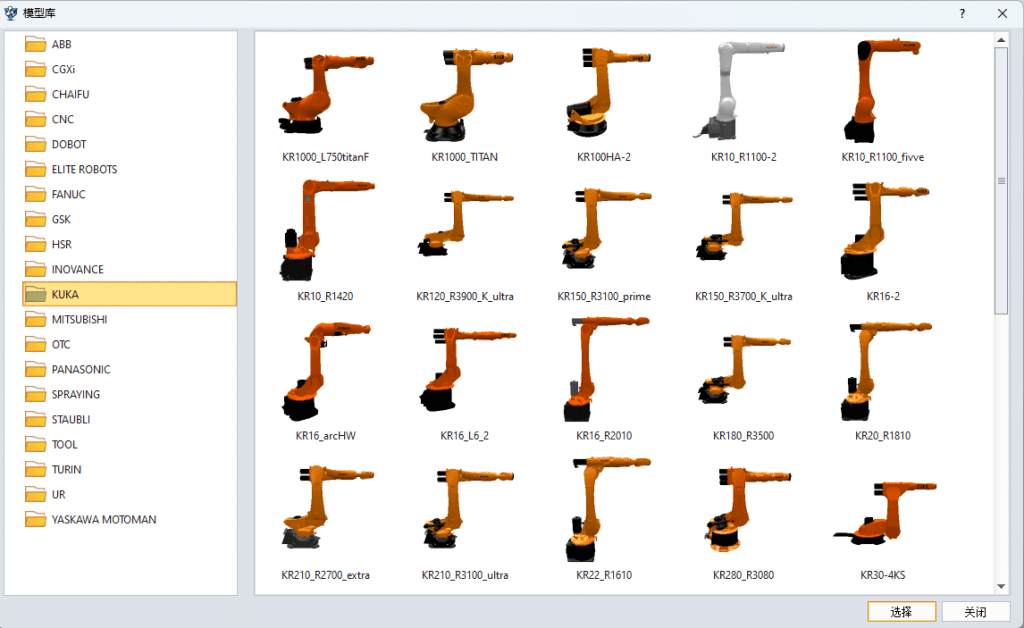
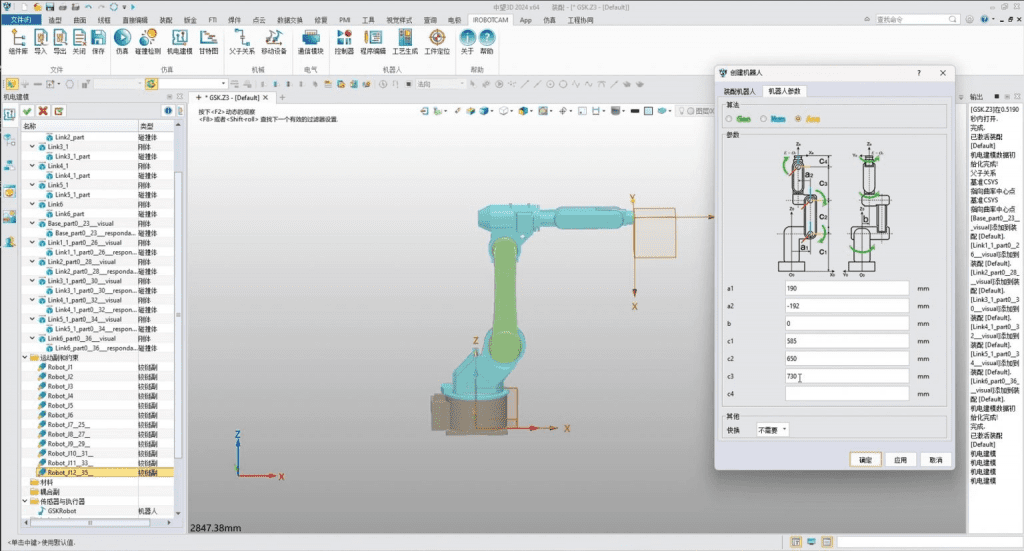
- 機器人庫的建立:針對工業(yè)機器人,可以利用內(nèi)嵌的包括ABB, Kuka, 安川,發(fā)那科,埃斯頓,廣州數(shù)控,華中數(shù)控,越疆,遨博,圖靈數(shù)十種品牌的機器人庫來建立機器人仿真模型,或通過機器人自定義功能,建立自有的機器人庫。針對人形或輪式機器人,可以根據(jù)需要建立相應(yīng)的部件的詳細關(guān)節(jié)信息,實現(xiàn)整體的關(guān)節(jié)定義,碰撞檢測等,形成完善人形或輪式特定機器人庫。
- 機器人訓練
- 機器人軌跡規(guī)劃模型的建立:支持多機器IO通信模擬仿真,支持多機器人同步,機器人多軸聯(lián)動規(guī)劃;
- 機器人訓練的物理模型的訓練:支持利用自有的物理引擎做物理特性的仿真,包括避障需求,碰撞分析等數(shù)據(jù)模型,同時支持擴展第三方接口,以支持特定場景的機器人的訓練算法。
- 與ROS機器人的數(shù)據(jù)對接,實現(xiàn)聯(lián)合調(diào)試
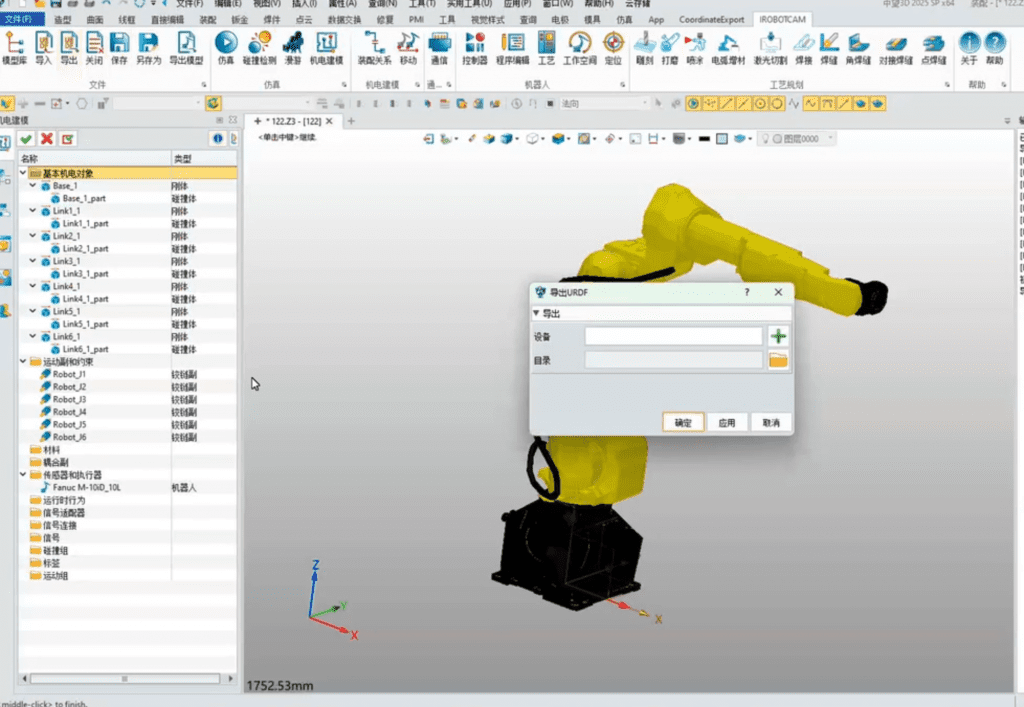
- 利用iRobotCAM完成的機器人優(yōu)化模型,可以導出URDF以便于進一步在ROS機器人仿真與執(zhí)行
- 利用URDF的導入功能,可以將機器人基礎(chǔ)模型導入iRobotCAM, 在iRobotCAM上對于機器人數(shù)據(jù)環(huán)境進一步修改并訓練,滿足機器人的數(shù)據(jù)模型的設(shè)計目標。
關(guān)于南京越擎信息科技有限公司
越擎科技致力于打造開放的iRobotCAM機器人建模與編程平臺,是集產(chǎn)線機電概念設(shè)計,機器人建模與加工,虛擬調(diào)試等一體的數(shù)字化解決方案.
iRobotCAM網(wǎng)站: www.bluebbwtube.com,聯(lián)絡(luò)郵件: cooperation@iRobotCAM.com